4.2. Multivariable Calculus#
import numpy as np
%matplotlib inline
import matplotlib.pyplot as plt
from matplotlib import animation
from mpl_toolkits.mplot3d import Axes3D
from IPython.display import HTML
import sympy as sym
from scipy.special import factorial
from IPython.display import Javascript, HTML, display
%load_ext jsxgraph-magic
---------------------------------------------------------------------------
ModuleNotFoundError Traceback (most recent call last)
Cell In[1], line 9
5 from mpl_toolkits.mplot3d import Axes3D
6 from IPython.display import HTML
----> 9 import sympy as sym
10 from scipy.special import factorial
12 from IPython.display import Javascript, HTML, display
ModuleNotFoundError: No module named 'sympy'
draft version of notes disclaimer: these notes are very much in their initial stages, typos and erros may be present. notice: you do not have permission to distribute these notes
4.2.1. Multivariate Functions and Partial Derivatives#
4.2.1.1. Multivariate Function#
A multivariate function is a function that takes two or more variables as inputs and produces a single output. In general a multivariate function maps from \( \mathbb{R}^n \) to \( \mathbb{R} \):\((f(x_1,~ x_2,~ ...~,~x_{n})\)
Here are some two examples:
Two-variable function, \(f(x,y) = x^2 + y^2\)
Three-variable function, \(f(x,y,z)=x + 2y -z \)
# Define the complex surface function
def f(x, y):
return np.sin(x) * np.cos(y) + -(x**2 + y**2)/10
# Create a grid of x and y values
x = np.linspace(-4, 4, 100)
y = np.linspace(-4, 4, 100)
X, Y = np.meshgrid(x, y)
Z = f(X, Y)
# Plot the 3D surface
fig = plt.figure(figsize=(14, 6))
ax = fig.add_subplot(121, projection='3d')
surf = ax.plot_surface(X, Y, Z, cmap='gray', edgecolor='none', alpha=.7)
x0=1
y0=-2
f0=f(x0,y0)
ax.scatter(x0, y0, f0, color="red", s=40, label=r"$f(x_0, y_0)$")
# Add labels and title
ax.set_title(r'Surface Plot of $f(x, y) = \sin(x)\cos(y) - \frac{x^2 + y^2}{10}$', fontsize=20)
ax.set_xlabel('x', size=20)
ax.set_ylabel('y',size=20)
ax.set_zlabel('f(x, y)')
ax.legend(fontsize="xx-large")
# Plot the grid
ax=fig.add_subplot(122, aspect=True)
ax.set_xlim(-4,4)
ax.set_ylim(-4,4)
plt.xticks(np.arange(-4, 5, 1))
plt.yticks(np.arange(-4, 5, 1))
# Add a specific point at (x = 2, y = 1)
ax.scatter(x0, y0, color='red', s=100)
ax.arrow(x0, y0, 2, 0, head_width=0.2, head_length=0.3, fc='black', ec='black')
ax.arrow(x0, y0, 0, 2, head_width=0.2, head_length=0.3, fc='black', ec='black')
ax.plot(-.5,-2, marker=r"$(x_0, y_0)$", markersize=60, color="black", alpha=.5)
ax.plot(2.75,-2.75, marker=r"$(x_0+\Delta x, y_0)$", markersize=90, color="black", alpha=.5)
ax.plot(2.5,0, marker=r"$(x_0, y_0 + \Delta y)$", markersize=90, color="black", alpha=.5)
ax.set_title(r"$x-y$ grid", size=20)
ax.set_xlabel("x", size=20)
ax.set_ylabel("y", size=20)
#ax.gca().set_aspect('equal')
ax.grid(True)
plt.tight_layout()
4.2.1.2. Partial Derivatives#
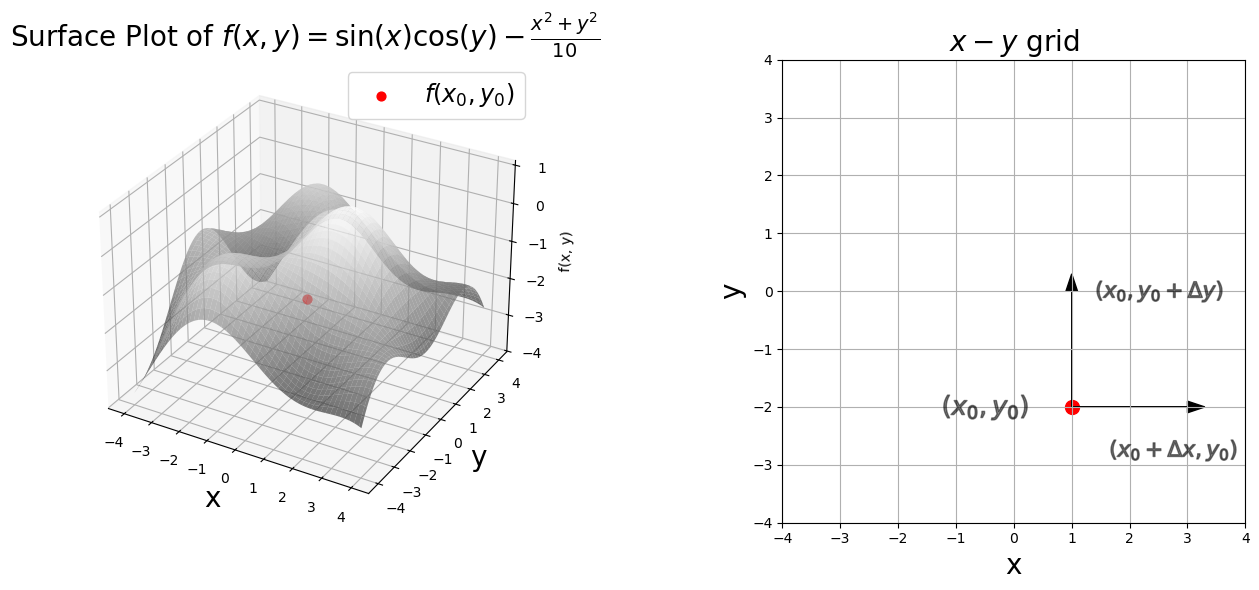
Above is the plot of the function
an upside-down paraboloid with oscillations, i.e., a lumpy hill. (Scroll up to see the plot.)
Let’s take a stroll down imagination lane. Imagine the surface as a hill. The height of the hill above ground level corresponds \(f(x,~y)\). You are a surveyor, currently at position \((x_0,~ y_0)\), the red dot marked on the right plot below (the x-y grid). You record the height at \((x_0,~ y_0)\), let us call this \(f_0=f(x_0,~ y_0)\) (this is the red dot on the left panel). You then take a step in the x-direction, \(\Delta x\), maintaining your y-position at \(y_0\). You measure the height at this location, \(f(x_0 + \Delta x, y_0)\). Now you compute the slope from \(x_0\) to \(x_0 + \Delta x\),
You return to your original location at \((x_0,~ y_0)\). You repeat the process but decrease your step \(\Delta x\). Your measurement tools enable you to decrease the step \(\Delta x\) as much as you like, however small you want to make it (this is imagination lane after all). In the limit as \(\Delta x\) goes to zero, you have measured the partial derivative of \(f(x,y)\) with respect to \(x\) at the point \((x_0,~y_0)\),
Notice that you held the value of \(y\) constant at \(y_0\).
You return to your original location at \((x_0,~ y_0)\). You repeat the process but take step \(\Delta y\) in the y-direction while maintaining your position at \(x_0\). You construct a slope in the y-direction,
You employ your ability to make \(\Delta y\) as small as possible. You have measured the partial derivative of f(x,y) with respect to y at the point \((x_0,~y_0)\),
Definition
Given a function \(f(x_1, x_2, \dots, x_n)\), the partial derivative of \(f\) with respect to \(x_i\) is the derivative of \(f\) treating all other variables \(x_j\) (\(j \neq i\)) as constants, denoted by
You can reduce particle derivatives to the single variable case by keeping all but one variable constant. For example, consider the function, \(f=f(x_1, x_2, x_3)\). Suppose we keep the last two slots constant, i.e., \(x_2\) and \(x_3\), and consider the single variable function, \(g(t) = f(t, x_1, x_2)\). The partial derivative of \(f\) with respect to \(x_1\) is the derivative of the single variable function \(g(t)\).
Interpretations:
It is the rate of change of \(f\) in the direction of the \(x_i\) axis, while all other variables are held constant.
The partial derivative with respect to \(x_i\) represents the slope of the function in the direction of the \(x_i\)-axis, holding all other \(x_j\) constant.
Example
Let \(f(x, y) = x^2y + 3xy^2\).
The partial derivative with respect to \(x\) is found by treating \(y\) as a constant:
The partial derivative with respect to \(y\) is found by treating \(x\) as a constant:
4.2.1.3. Higher Order Partial Derivatives#
Partial derivatives can be taken multiple times. For example, the second partial derivative of \(f\) with respect to \(x\) and \(y\) is:
4.2.1.4. Mixed Partial Derivatives#
If the function is smooth enough, mixed partial derivatives are equal. That is, if \(f(x, y)\) has continuous second partial derivatives:
This is known as Clairaut’s Theorem.
Back to the initial example Let’s go back to the initial example,
I could write out the partial derivatives here, well, “to heck with that”, I will just use SymPy. See the code below. I will let you to check if SymPy is correct.
x, y = sym.symbols("x y")
f=sym.sin(x)*sym.cos(y) - (x**2 +y**2)/10
# partial derivative with respect to x
f.diff(x)
# partial derivative with respect to y
f.diff(y)
# second partial derivative with respect to x
f.diff(x,2)
# second partial derivative with respect to y
f.diff(y,2)
# second partial derivative with respect to x and y, f_{x,y}, method 1
sym.diff(f,x,y)
# second partial derivative with respect to x and y, f_{x,y}, method 2
f.diff(x,y)
# second partial derivative with respect to x and y, f_{x,y}, method 3
f.diff(x,y)
f.diff(x).diff(y)
4.2.2. The Gradient#
The gradient of a scalar function \(f(x_1,x_2,...,x_n)\) is a vector that contains all the partial derivatives of \(f\) with respect to \(x_1,x_2,...,x_n\),
The symbol for the gradient is called the nabla or dell operator \(\nabla\) (the upside down triangle).
For a function of two variables:
The gradient is:
Back to imagination lane. Recall you are a surveyor, measuring the change in height of a hill; think of \(f(x,~y)\) as the height map. The partial derivative in the x-direction measures the rate of change of height as you move in the x-direction. The partial derivative in the y-direction measures the rate of change of height as you move in the y-direction.
You ask yourself a question, “In which direction should I walk so that the path I take is the steepest?” (Ignoring the fact that no one would want to take the steepest path, again, it’s imagination lane here). Now you don’t have to walk in either the x or y directions, you can choose a path in any direction. The direction you should choose is the direction of the gradient.
The gradient points in the direction of the steepest rate of increase of the function (often called the direction of steepest ascent)
The gradient tells us how the function changes in each direction at a given point.
It is perpendicular to level curves (contour lines) of the function.
Optimization and the Gradient
In optimization, we don’t want to move in the direction that the function (i.e. the loss function) increases most rapidly. We want to move in the direction of the most rapid decrease, as we are trying to get to the minima of the loss function (“what I call the bottom of things”). This means we should move in the direction of the negative of the gradient. We can write the optimiation rule as
Gradient descent is one of the most common optimization algorithms. The gradient desent rule looks like this
where \(L\) is the loss function, \(\mathbf{x}_n\) are the function paramters at step \(n\), likewise, \(\mathbf{x}_{n+1}\) are the function parameters at step \(n+1\), and \(\eta\) is called the learning rate, which controls how large of a step to take.
Example of a Gradient
Let:
Then:
So the gradient is:
Here is the above example in SymPy.
x, y = sym.symbols("x y")
f = x**2*y + sym.sin(x*y)
df = sym.Matrix([f.diff(val) for val in (x,y)])
df
4.2.3. The Jacobian#
For a function \(f : \mathbb{R}^n \to \mathbb{R}^m\), the Jacobian is defined as
The elements in index notation for the Jacobian are
The i-th row of the Jacobian is the gradient of \(f_i\).
Example Consider the vector valued function
The Jacobian is
Here is the above example in SymPy.
x, y = sym.symbols('x y')
# Define a vector-valued function (e.g., f(x, y) = [x^2 * y, sin(x + y)])
f1 = x**2 + y**2
f2 = x**2 + x*y
# Create the vector-valued function
f = sym.Matrix([f1, f2])
# Compute the Jacobian matrix
jacobian_matrix = f.jacobian([x, y])
f
jacobian_matrix
4.2.4. Hessian#
The Hessian matrix is a square matrix of second-order partial derivatives of a scalar function. Given a twice-differentiable function \(( f: \mathbb{R}^n \to \mathbb{R} )\), the Hessian matrix \(H\) is defined as:
When we considered functions of a single variable, we learned that the second derivative contained information about the curvature of the curve. Likewise, the Hessian contains information about the local curvature of the multivariate function.
Example
Computing second-order derivatives:
Here is the SymPy code for the example above.
# Define the variables
x, y = sym.symbols('x y')
# Define a scalar-valued function (e.g., f(x, y) = x^2 + y^2)
f = x**3 + y**2 + x*y
# Compute the Hessian matrix
hessian_matrix = sym.hessian(f, [x, y])
hessian_matrix
4.2.5. The Chain Rule#
The chain rule is used to compute the derivative of composite functions.
For a composite function \(f=f(g(x))\) the chain rule provides the derivative:
Example Let us consider a composite operation composed of a linear transformation of input data \(x\) followed by a non-linear transformation,
where \(y\) is the output data and \(\sigma\) is called the sigmoid function.
We want the partial derivatives of \(y\) with respect to the model parameters \(\beta_0\) and \(\beta_1\):
We compute each term individually.
We now have:
Below, I checked the result in SymPy.
x,z,beta_1, beta_0 = sym.symbols("x z beta_1 beta_0")
z=beta_0 + beta_1 *x
z
y = 1/(1 + sym.exp(-z))
y
y.diff(beta_0)
y.diff(beta_1)
4.2.6. Multivariable Taylor Series#
A multivariable function has a Taylor series given by,
Explanation:
\(\mathbf{x} = \left[ x_1, x_2, ..., x_n\right]^T\): A vector representing the point at which the Taylor series is expanded.
\(\mathbf{\Delta x}= \left[\Delta x_1, \Delta x_2, ..., \Delta x_n\right]^T\): A vector representing the displacement from \(\mathbf{x}\).
\(f(\mathbf{x})\): The value of the function at \(\mathbf{x}\).
\(\nabla f(\mathbf{x})\): The gradient of f at \(\mathbf{x}\), which is a vector of the first partial derivatives.
\(\nabla f(\mathbf{x}) \cdot \mathbf{\Delta x}\): The dot product of the gradient and the displacement vector.
\(H_f(\mathbf{x})\): The Hessian matrix of f at \(\mathbf{x}\), which is a matrix of the second partial derivatives.
\(\mathbf{\Delta x}^T\): The transpose of the displacement vector.
\(\frac{1}{2} \mathbf{\Delta x}^T H_f(\mathbf{x}) \mathbf{\Delta x}\): A quadratic form involving the Hessian and the displacement vector.
\(\cdots\): Represents higher-order terms in the expansion.